3th week report : suspension simulation by simulink
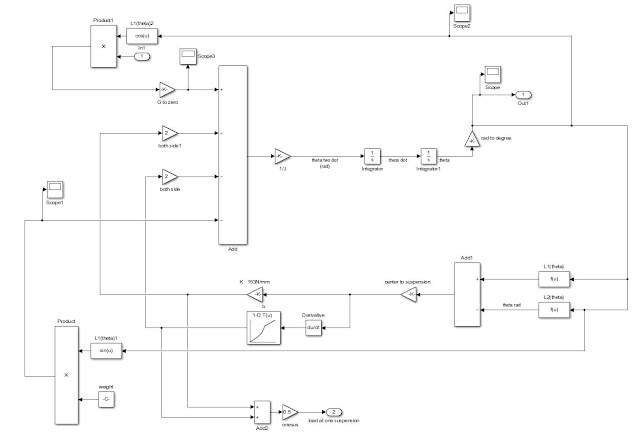
- Simulation of equation part - Exerting Force(4type) -Angle calculation - Result ->> Sudden lateral force causes severe vibration. So we have to control so that sudden force is not applied.

